


All'Italia potrebbero arrivare 8 miliardi in sette anni: [...]

Marco Bussone confermato presidente di Pefc Italia fino [...]

Il mistero dei bolli blu di vernice spray apparsi sulla [...]

"Una brutta pagina per i Comuni montani, rischia di [...]

"Alla quota di Misurina, il respiro dei bambini [...]

In Basilicata arriva la "pista sintetica di ultima [...]

Escursionisti dispersi ritrovati in poche ore grazie a un [...]

"Un tornello all'inizio del sentiero che conduce al lago [...]

"Il Corno Grande non è una passeggiata". Un nuovo [...]

Anni dopo aver conosciuto il Trentino in roulotte, [...]
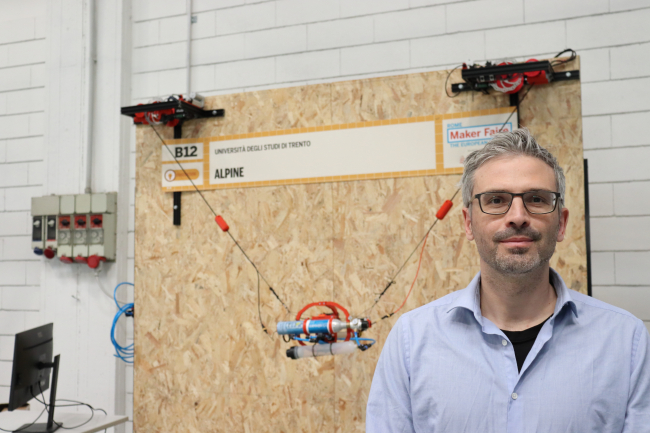
Un ragno-robot che si muove sulle pareti di roccia (VIDEO) "Salterà nell'anfratto irraggiungibile dove si trova il ferito". Il nuovo strumento che potrebbe rivoluzionare i soccorsi in montagna

Ispirazione dalla natura, esperienza alpinistica e tecnologia robotica, così è nata l'idea di Alpine: "Robot intelligente e autonomo per operazioni in ambienti montani". Vincitore del bando Future of Work della Fondazione Valorizzazione ricerca trentina, ne parliamo con Michele Focchi, docente dell'Università di Trento e responsabile del progetto

di cui il Comitato scientifico dell’AltraMontagna è garante.
Il report annuale del Soccorso Alpino Nazionale - uscito proprio oggi - ha svelato un anno impietoso per gli incidenti in montagna. Non ci sono mai stati tanti interventi di soccorso come nel 2025. Anche i decessi sono tornati ad aumentare, ben 62 in più rispetto al 2024, capovolgendo così un leggero trend positivo che aveva interessato gli ultimi anni.
Proprio per far fronte a questi contesti aspri e difficilmente raggiungibili, sia per il soccorso che la manutenzione delle pareti, l’Università di Trento ha dato forma al progetto "Alpine: Robot intelligente e autonomo per operazioni in ambienti montani".
Coordinato da Michele Focchi, docente di robotica al Dipartimento di Ingegneria e Scienza dell’Informazione, il progetto nasce da un’intuizione frutto della passione alpinistica del ricercatore e dei suoi studi sulla mobilità animale. Così è nato un ragno robot capace di muoversi su terreno verticale.
"L'idea di Alpine è nata perché io pratico alpinismo da quasi 20 anni. Mi è capitato spesso di fare calate in corda doppia e di dover raggiungere determinate soste. Quando le calate non sono verticali ma sono laterali, occorre fare dei pendoli, dei salti laterali, coordinando la spinta delle gambe con il rilascio della corda dal discensore per riuscire ad atterrare in un punto desiderato".
Chi ha esperienza d’alpinismo capisce facilmente cosa intende il professore: si tratta di una difficoltà non banale, che può esporre facilmente al pericolo. Anche scientificamente, la questione non è semplice da risolvere: una possibile soluzione arriva dall’osservazione degli aracnidi.
"Abbiamo pensato ai ragni che si calano con la loro dragline, con il filo che generano. In questo modo, calandosi e utilizzando le zampe come metodo di locomozione, riescono ad accedere a terreni difficili, quasi verticali, in cui non è facile accedere con altri mezzi convenzionali".
Michele Focchi ha lavorato 12 anni all’Istituto Italiano di Tecnologia di Genova, dove ha cofondato un gruppo di ricerca internazionale, tra i più importanti al mondo, per lo sviluppo di robot quadrupedi. "Negli ultimi tempi avevo fatto degli studi per coordinare il movimento di questi robot a zampe con la corda. La naturale estensione è stata quella di combinare i miei studi di robotica sui salti dei quadrupedi e l'alpinismo".
Mettendo insieme tutti questi ingredienti - la bio-ispirazione alla natura, l'esperienza alpinistica e l'esperienza robotica, con un robot a zampe - è nata l'idea di Alpine.

"Inizialmente avevamo sviluppato Alpine con una sola corda - spiega lo scienziato - ma ci siamo resi conto che le possibilità in termini di mobilità laterale sulla parete erano molto limitate. Per cui c'è stata l'evoluzione da una corda a due. In questo modo, fissando due ancoraggi in cima alla parete, a un ponte o ad altri ambienti, ci permette di calarci e di realizzare salti per evitare ostacoli. Tutto ciò è possibile riavvolgendo o srotolando (tramite arganelli) i cavi che collegano il robot agli ancoraggi in maniera coordinata con una zampa che spinge il robot fuori dalla parete".
Un algoritmo di ottimizzazione permette di sincronizzare la spinta della zampa con il graduale rilascio (o avvolgimento) delle corde per fare in modo di atterrare in punti precisi della parete, , evitando gli ostacoli come protrusioni, fessure o arbusti. Con questo sistema il robot è idealmente in grado di raggiungere qualsiasi punto lungo tutta la parete tra i due ancoraggi.
La prima applicazione per cui è stato formulato il ragno robotico era la manutenzione su pareti: "Adesso, con il rischio idrogeologico che comportano i cambiamenti climatici, le pareti sono più instabili. Fare manutenzione, e quindi mandare guide alpine o esperti del mestiere, in loco mette a rischio la loro salute, perché le pareti stesse possono cedere nel momento del disgaggio".
Di seguito, il video esplicativo del progetto.
Anche nel caso di perforazioni, c'è un tempo limite di esposizione al giorno per questi operatori, questi operai d'alta quota, alle vibrazioni. Per queste ragioni, nell'idea di digitalizzare la gestione del rischio idrogeologico e quindi renderlo più puntuale, questa piattaforma robotica può permettere di effettuare delle operazioni di manutenzione in loco in maniera sicura e controllata.
Rispetto ai droni - poi - ha il vantaggio fondamentalmente di poter rimanere fermo in un particolare punto della parete senza spendere energia. Ce lo spiega il professor Focchi: "Una volta che arriviamo in loco, in zona dove vogliamo fare la nostra attività di manutenzione, magari dovendo portare trapani o altra attrezzatura, per allestire un ancoraggio o per poter fissare delle reti di contenimento, noi possiamo bloccare con dei freni a disco i rocchetti degli arganelli, così da poter rimane sospesi sulle corde senza consumare energia".
Un drone, al contrario, dovrebbe continuamente star lì sospeso a mezz’aria. Gli altri sistemi che utilizzano climbing robot senza corde, attualmente, non sono altrettanto in grado di portare pesi così consistenti come un trapano, una perforatrice o anche per esempio la barella con un ferito.
Il team, poi, sta lavorando ad ulteriori sviluppi. "La mia idea che ho avuto recentemente a questo fine è di aggiungere delle ruote. Lo si vede anche dal video: il robot fa il salto spingendosi con la zampa, ma nei punti in cui non ci sono ostacoli non ha senso saltare. Può avere delle ruotine con cui muoversi su pareti lisce, come placche libere di ostacoli, come se fosse una macchinina, in maniera veloce recuperando le corde".

"Una volta arrivato in loco lui salterà fino nell'anfratto irraggiungibile dove si trova il ferito, e poi, una volta agganciato, - non potendo fare grossi salti - tramite le ruote seguirà il profilo della montagna, riuscendo così a riportare l’uomo in salvo".
Ma come facciamo ad essere sicuri che non si stacchi dalla parete? "Sulla schiena del robot - continua a spiegare Michele Focchi - abbiamo dei propeller, delle eliche che ci permettono, dove necessario, per aumentare l'attrito con la parete o anche per forare, per creare la forza necessaria per fare il foro con la percussione, di fare delle forze perpendicolare alla parete".
Le stesse eliche possono essere utilizzate anche durante la fase di volo per aggiustare l'orientamento: mettiamo che lui sta facendo il salto, si ruota e atterrebbe storto: non riuscirebbe a dissipare l'impatto in una maniera opportuna; così invece può essere controllato. Insomma, si tratta di un sistema ibrido, zampe, corde e eliche da drone.
Il sistema di comando è duplice: laddove possibile bisognerebbe fare uno scanner della parete per sapere come muoversi, tuttavia, in casi di emergenza, può anche essere comandato tramite un joystick dall'operatore. Sia il geologo che l'operatore del soccorso alpino potranno vedere ciò che vede il robot tramite un visore collegato ad una camera 360 montata on board.
Attualmente, il progetto è finanziato da un bando da un bando Caritro, "Future of works", con il quale sono stati acquistati i componenti per lo sviluppo successivo dell'ingegnerizzazione del prototipo. L’idea ora è quella di trovare realtà interessate al finanziamento del progetto, per lo sviluppo e la messa in funzione: dal Soccorso Alpino alla Protezione Civile e - perché no – ad aziende private, anche in ambito industriale o edilizio.
Il sistema attualmente è funzionante in simulazione, parametrizzato e quindi applicabile a diverse esigenze. Secondo le stime del coordinatore, in un anno potrebbe essere pronto per il test outdoor: c'è un brevetto che è stato depositato e che può essere licenziato dall'università, perché venga messo in funzione.
All’ottimizzazione e allo sviluppo di un prototipo reale e funzionante del sistema robotico ha contribuito il lavoro di Luca Hardonk, Ruben Malacarne e Andrea Dalla Villa, studenti, laureati e laureandi, del Dipartimento di Ingegneria e Scienza dell’Informazione dell’Università di Trento.
UNA DONAZIONE





